강의복습
1. Object detection
더보기







1) Object detection
- Sementic segmentation: 클래스만 구분 가능
Instane segmentation, Panopti segmentation: 개체 각각 구분 가능
- object detection: Classification + Box localization
- 예시: Autonomous driving, Optical Character Recognition(OCR)
2) Two-stage detector(R-CNN family)
- Gradient-based detector (e.g. HOG)
- Selective search(Box proposal)
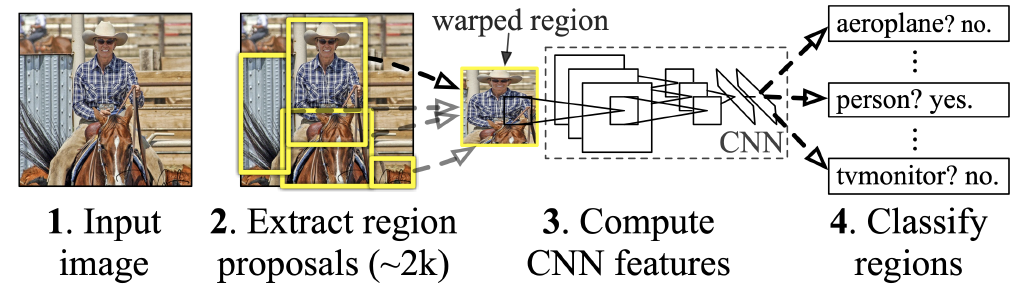
- R-CNN: Regions with CNN features, Directly leverage image classification networks for object detection
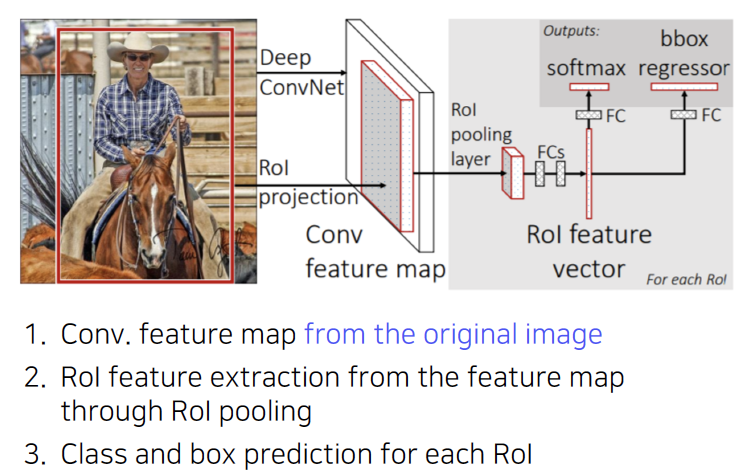
- Fast R-CNN: Recycle a pre-computed feature for multiple object detection,
- Faster R-CNN: End-to-end object detection by neural region proposal
- IoU (Intersection over Union): A metric commonly used in object detection
- Anchor box
- Region Proposal Network(RPN)
- Non-Maximum Suppression (NMS)
- Step 1: Select the box with the highest objectiveness score
- Step 2: Compare IoU of this box with other boxes
- Step 3: Remove the bounding boxes with IoU ≥ 50%
- Step 4: Move to the next highest objectiveness score
- Step 5: Repeat steps 2-4
- 참고: curt-park.github.io/2017-03-17/faster-rcnn/
- Summary of the R-CNN family
3) Single-stage detector
- YOLO (You only look once)
- Single Shot MultiBox Detector(SSD)
4) Single-stage detector vs two-stage detector
- Focal loss: Class imbalance (negative >> positive) 문제 해결
- 분류하기 쉬운 easy negative들이 대부분인데 이들이 학습에 기여하는 것이 거의 없기 때문에 비효율적
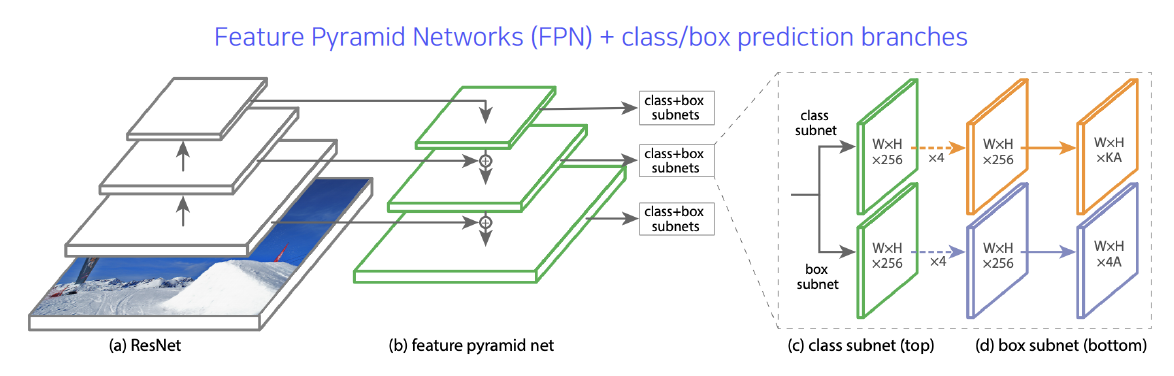
- RetinaNet: one-stage network (Feature Pyramid Networks(FPN) + class/box prediction branches)
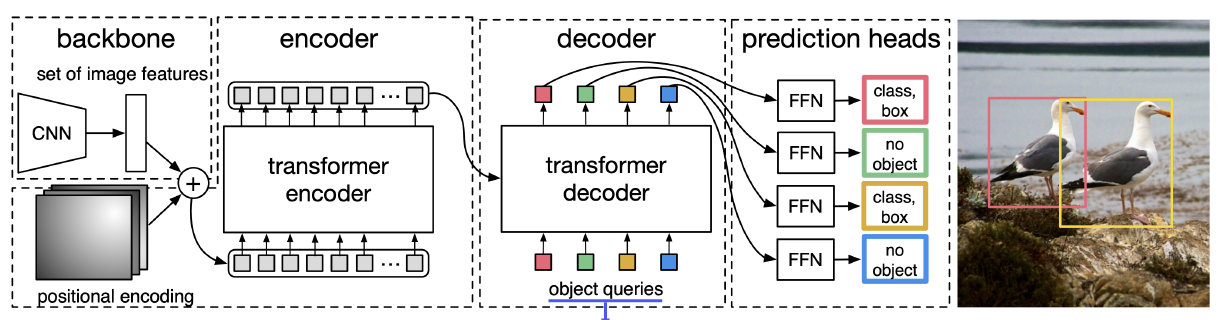
5) Detection with Transformer (DETR)
- Object query: Learned positional encodings for querying
6) Further reading
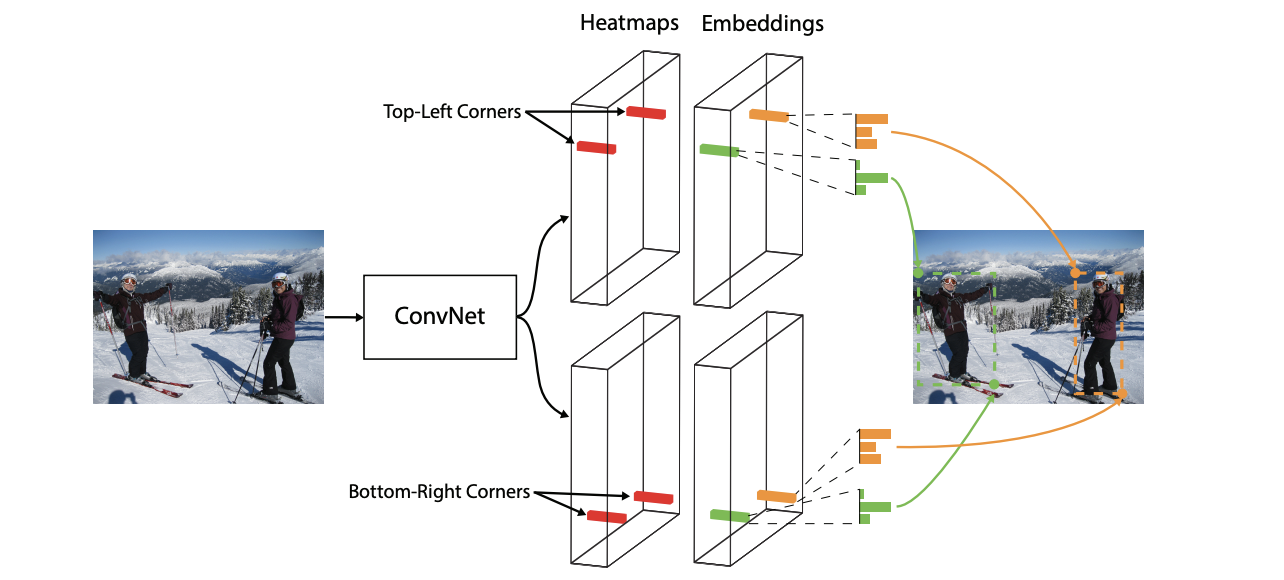
- Detecting objects as points
| CornerNet | CenterNet |
 |
 |
2. CNN visualization
더보기



SCOUTER
1) Visualizing CNN
- ZFNet
- Filter visualization
2) Analysis of model behaviors
- Embedding feature analysis
- Nearest neighbors in a feature space
- Dimensionality reduction
- Activation investigation
- Layer activation
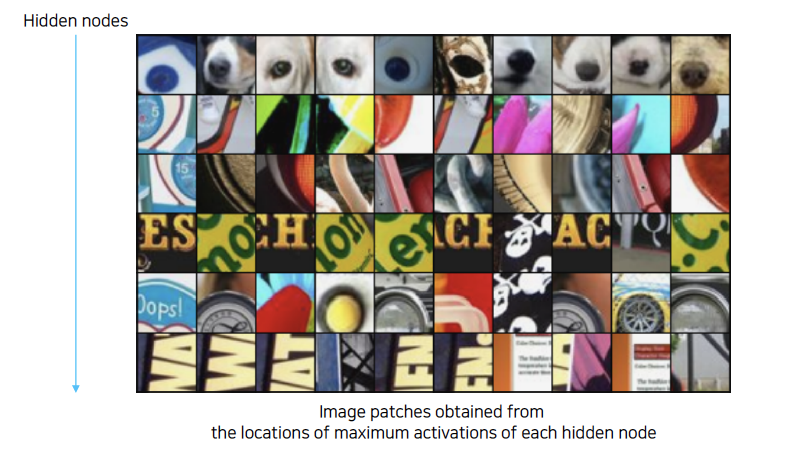
- Maximally activating patches
- Pick a channel in an certain layer
- Feed a chunk of images and record each activation value (of the chosen channel)
- Crop image patches around maximum activation values
- Class visualization - Gradient ascent
- Get a predicton score (of a target class) of a dummy image (blank or random initial)
- Backpropagate the gradient maximizing the target class score w.r.t the input image
- Update the current image
| Layer activation | Maximally activating patches | Class visualization |
 |
|
  |
3) Model decision explanation
- Saliency test
- Occlusion map
- via Backpropagation
- Get a class score of the target source image
- Backpropagate the gradient of the class score w.r.t input domain
- Visualize the obtained gradient magnitude map (optional)
| occlusion map | via Backpropagation |

|
 |
- Backpropagate features
- Rectified unit (backward pass)
- Guided backpropagation
- Class activation mapping(CAM): Global average pooling(GAP) layer instead of the FC layer
- Grad-CAM
- SCOUTER
| Rectified unit | Guided backpropagation |
 |
  |
| CAM | Grad-CAM |
  |
 |
코멘트
오늘 강의 내용은 흥미롭긴 했지만 어려웠다. 직접 해보지 않는 이상 잘 안 와닿을 것 같다.
'부스트캠프 AI Tech 1기 [T1209 최보미] > U stage' 카테고리의 다른 글
| Day35 학습정리 - CV5 (0) | 2021.03.12 |
|---|---|
| Day34 학습정리 - CV4 (0) | 2021.03.11 |
| Day32 학습정리 - CV2 (0) | 2021.03.09 |
| Day31 학습정리 - CV1 (0) | 2021.03.08 |
| Day30 학습정리 - AI + ML과 Quant Trading & AI Ethics (0) | 2021.03.05 |